
A rocket is launched. You do not get a long warning. You get a short window where every second matters. In that tiny slice of time, a system has to notice the threat, understand what it is, guess where it is going, decide whether it is dangerous, and respond fast enough to matter. If that sounds like science fiction, it is not. It is systems engineering under pressure.
So when people ask how Iron Dome works, I like to start with one simple idea. Iron Dome is not a “force field” over a city. It is not a magic shield that blocks everything. It is much closer to a real-time loop, like a very fast version of “sense → think → act,” repeated again and again.
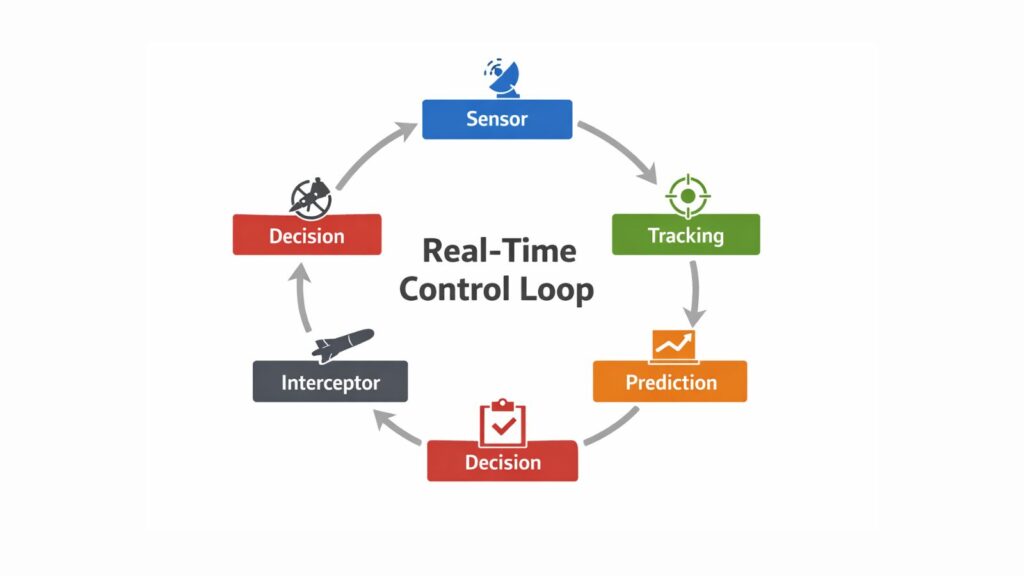
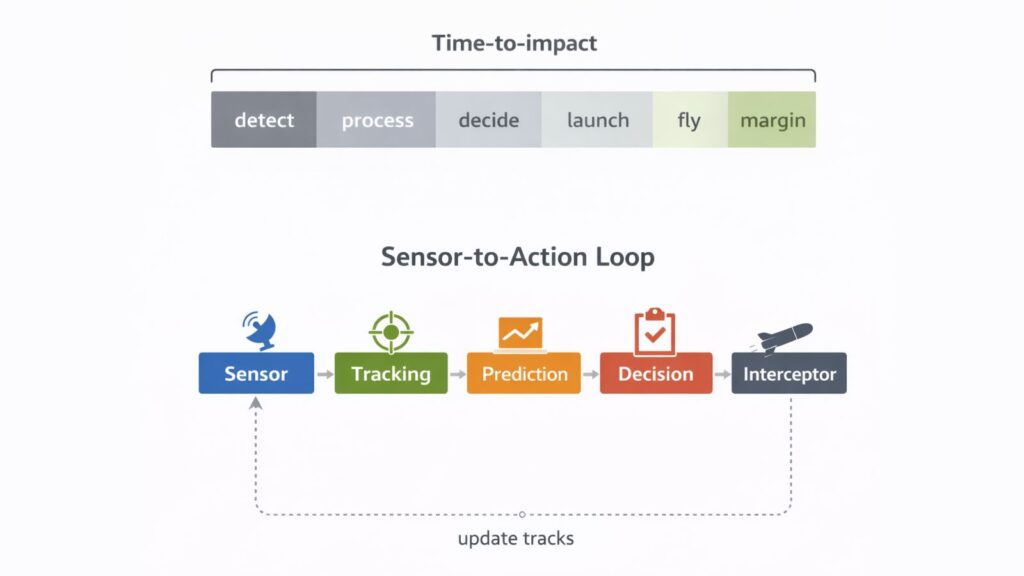
This article explains the idea in a way normal people can follow. I will keep the language simple. I will avoid tactics and operational details. No “how to overwhelm.” No placement or timing guidance. Just the big public-friendly engineering picture: sensor → tracking → prediction → decision → interceptor, and then feedback.
The easiest way to understand it
Imagine you are driving at night in heavy rain. Your eyes are the sensor. Your brain is tracking what you see. You predict what other cars will do. You decide whether to brake or steer. Then you act. After you act, you immediately check what changed and correct it.
Iron Dome is the same idea, just faster and more automated.
It follows a loop like this:
Sensor: Detect something in the sky.
Tracking: Keep a stable “moving dot” for that object.
Prediction: Estimate where it is heading and how soon.
Decision: Determine whether action is needed and select the appropriate action.
Interceptor: Launch and guide an interceptor if needed.
Feedback: Confirm what happened and update the system.
If you understand this loop, you understand the core of how Iron Dome works.
Step 1: Sensor turning the sky into data
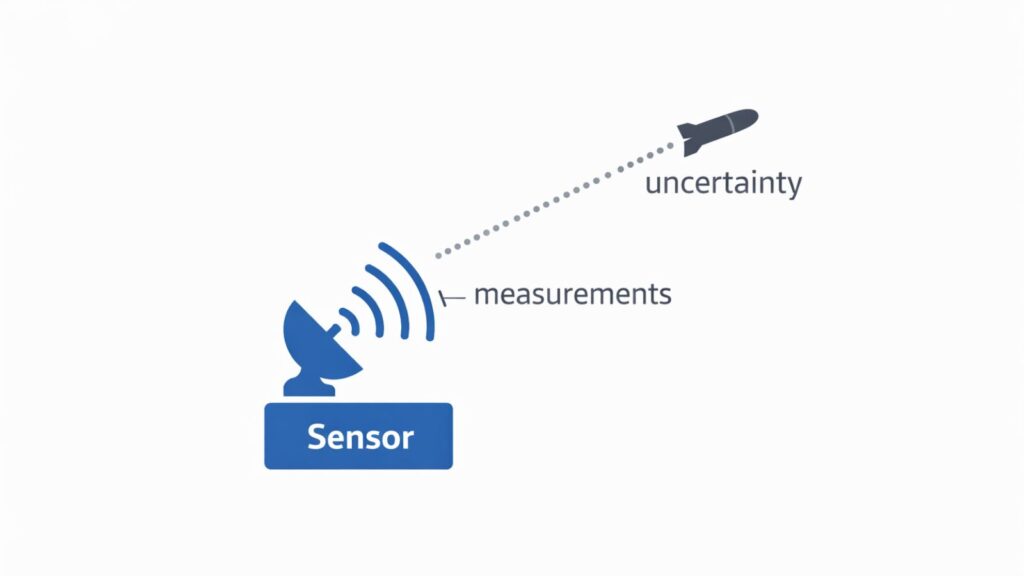
The first job is to notice something is there. This is mainly done by radar. You can think of radar like a flashlight that you cannot see. It sends out energy and listens for returns. If something reflects enough energy, it shows up as a detection. But here is the important part. The radar does not hand you a perfect answer. It does not say, “rocket, exact position, exact speed.” Real sensors do not work like that.
A sensor produces measurements with uncertainty. In simple terms, it is like saying:
“I think something is there.”
“I think it is roughly at this distance.”
“I think it is in this direction.”
“I think it is moving roughly this fast.”
The system must work with that. And it must do it fast.
This is why modern real-time systems care about things normal readers rarely hear about, like update rate and delay. If the sensor updates quickly and the data arrives with low delay, the next steps become easier. If the data is slow, everything downstream becomes harder.
Step 2: Tracking: connecting the dots
Now imagine you see a dot on a screen. Then the next moment, you see another dot near it. Then another. If you connect those dots smoothly, you get a “track.” Tracking is basically “connecting the dots” in a smart way. This matters because real detections can be messy. Sometimes you miss a detection. Sometimes you get a false one. Sometimes the object’s path is not perfectly smooth. So the system tries to build a steady estimate of where the object is and how it is moving.
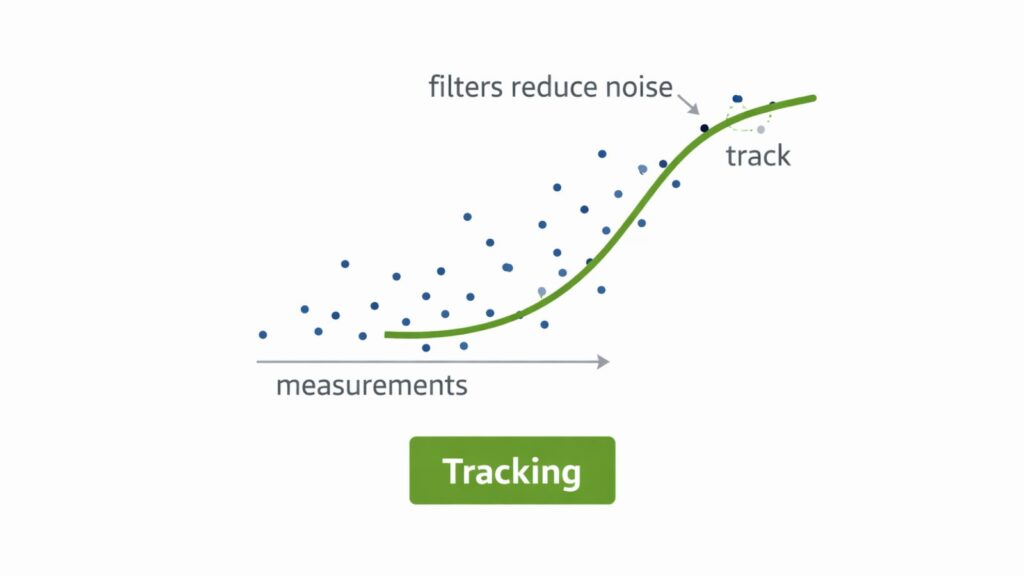
A simple way to picture it is like your phone’s GPS. Your GPS location jumps slightly even when you stand still. But your map app smooths that out so it looks stable. That smoothing is a form of tracking.
In a real-time defense system, tracking is one of the hardest parts because it must handle speed, noise, and multiple objects. It also has to decide which new detection belongs to which existing track. That is like trying to follow several moving cars in fog while your sensor occasionally blinks. Good tracking is not “nice to have.” It is the foundation for prediction.
Step 3: Prediction: the most important question is the future
Once the system has a stable track, it asks the question that actually matters:
“Where is this going?”
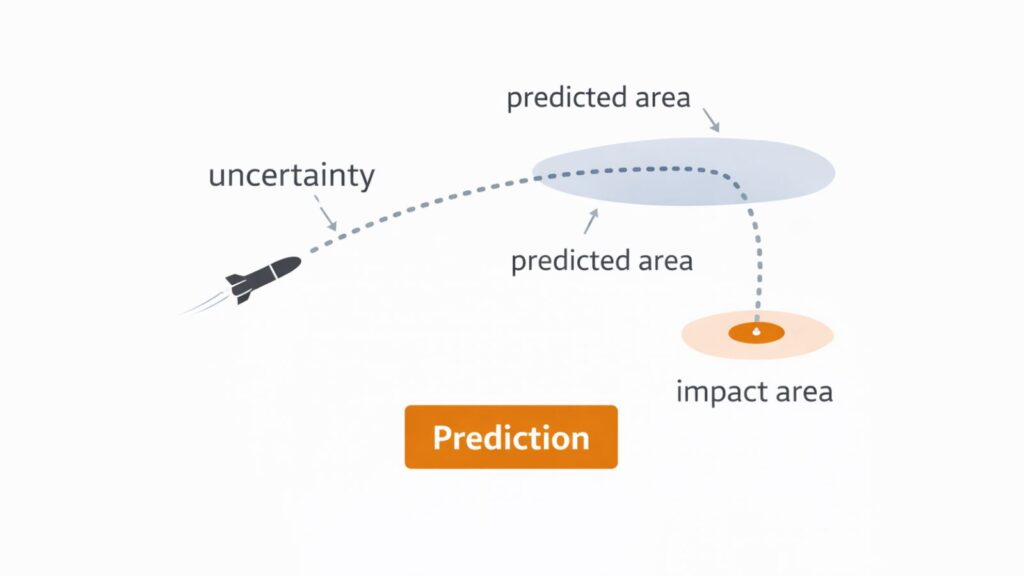
Prediction is the part that turns tracking into a real decision. A useful way to explain it without heavy math is this. If you know the direction and speed of an object, you can estimate where it will be after a short time. If you keep doing that, you can estimate where it might end up.
In the simplest teaching version, people use this idea:
time-to-impact ≈ distance ÷ speed
That is not a full physics model. It is a quick way to build intuition.
Let’s do a toy example, just for understanding.
Say an object is about 6,000 meters away along its path, and it is moving at around 300 meters per second. A rough time-to-impact estimate is:
6,000 ÷ 300 = 20 seconds.
That is not a claim about any real event. It is just a reminder of the timescale. Twenty seconds is nothing. Your phone takes longer than that to reboot. In those seconds, the system must sense, track, predict, decide, and act.
Why prediction is never “perfect”
This is where normal people often misunderstand the problem. Prediction is not fortune-telling. It is an estimation with uncertainty. Sensors have an error. Tracking has an error. Motion can change. Data can arrive late. So a prediction is usually more like:
“It is likely going here.”
“It could land somewhere in this area.”
“We are more confident about the center than the edges.”
Engineers treat that uncertainty seriously. They design systems that still make good decisions when the estimate is not perfect. That is why margins matter.
Step 4: Decision: not everything is intercepted
This step is important for both engineering and public understanding. A lot of people assume a defense system should intercept everything it detects. That sounds nice. But real systems do not work that way. They have limited resources. They have limited time. They are designed to prioritize.
So the decision step asks a few simple questions:
Is this object actually a threat?
Is it likely to impact a protected area?
Do we have time to act?
Is an intercept attempt justified right now?
This is not about “being selective” for drama. It is about engineering reality. You can compare it to an emergency room. If ten people arrive at once, doctors do triage. They focus on the cases that are most urgent and most dangerous first. That is not cruelty. It is how you save the most lives with limited capacity.
The decision block in a real-time system is similar. It is resource management under time pressure.
A simple probability idea (without performance claims)
Another way to explain decision-making is to talk about risk, not certainty.
In many engineering fields, a simple concept is:
Expected risk = chance × consequence
If the chance of harm is low or the consequence is low, a system may choose one action. If both are high, it may choose another. This is not special to defense. It is used in safety engineering, aviation, medical alarms, and industrial plant protection. The key point is this. Decision-making is not “guessing.” It is structured logic designed to work under uncertainty.
Step 5: Interceptor: the “act” part of the loop
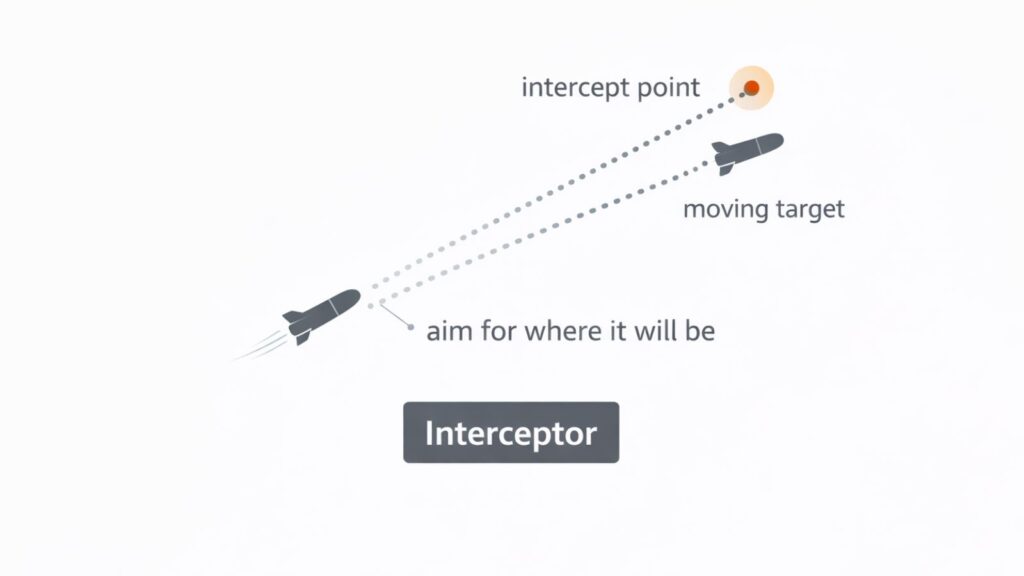
If the system decides to engage, the next step is action. In a control loop, the interceptor is like the actuator. It is the part that physically does something in the world. At a high level, an intercept attempt is a guidance problem. The interceptor must be guided to meet a moving target at the right time and place. You do not need detailed guidance equations to understand the idea. Think of it like trying to meet a friend who is walking. If your friend is moving, you do not aim for where they are now. You aim for where they will be when you arrive. That is the essence of interception. It is “meeting in the future,” not “chasing the present.”
In real systems, guidance is updated as new tracking data comes in. The system senses, updates the track, refines the prediction, and corrects the interceptor’s path. That is why it is a loop, not a one-time command.
Step 6: Feedback: what makes it a loop
A loop must close. After an intercept attempt, the system does not stop. It keeps sensing. It keeps tracking. It checks if the threat still exists. It checks if the situation changed. It updates its internal picture.
This feedback is also important for reliability. Complex systems need health monitoring. They need to know if a sensor is degraded. They need logs. They need diagnostics. They need maintenance data. That is the unglamorous engineering side that makes the glamorous part possible.
Why is timing the real “boss” of the system?
If you want one engineering lesson that ties everything together, it is this:
The real enemy is delay
Every step takes time. Even small delays add up.
Here is a simple way to explain it in normal language. Suppose you have:
A short time to detect and confirm.
A short time to build a track.
A short time to predict the path.
A short time to decide.
A short time to launch.
A short time for the interceptor to travel.
Even if each part takes only a little time, the total can become large compared to the time-to-impact.
This leads to a useful teaching idea called a margin.
Reaction-time margin = time-to-impact − total system delay
If that margin is big, you have room for uncertainty.
If it is small, tiny delays can ruin the outcome.
If it is negative, you are too late.
This is a powerful way to explain the system without revealing any sensitive details. It also connects directly to calculators that your readers can play with.
Common misunderstandings

Many viral posts spread because they are dramatic, not because they are accurate. One misunderstanding is that the system is a bubble over a city. It is not. It is a real-time process. Another misunderstanding is that the interceptor is the whole story. It is not. Sensors, tracking, and decision logic are equally important. If you detect late or predict poorly, the best interceptor cannot fix the time. A third misunderstanding is that detection means certainty. It does not. Sensors have false alarms and missed detections. Engineers design systems to operate safely anyway.
And finally, a lot of people think “smart systems” work like humans. They do not. They work like rules and models that are tested, validated, and built to handle uncertainty.
Why is this impressive from an engineering perspective?
When you step back, the impressive part is not one component. It is the integration.
You have sensing hardware that must be fast and reliable.
You have software that must track multiple objects in real time.
You have a prediction that must work with uncertainty.
You have decision logic that must act under constraints.
You have an interceptor that must be guided rapidly.
And you have a feedback loop that must keep updating without falling apart.
That is systems engineering. It is hardware, software, timing, reliability, and control logic working together. This is also why these systems are hard to replicate. The “idea” is not the hard part. The “making it robust at scale” is the hard part.
Quick FAQ
Does Iron Dome block everything?
No system can promise that. Real systems work within limits and prioritize. The engineering goal is to reduce risk, not create a perfect shield.
Is it just one device?
No. It is a set of parts working together. The easiest way to understand it is as a loop: sense, track, predict, decide, act, and update.
Why is prediction so important?
Because action depends on the future, not the present. If you wait until something is “close,” you may be out of time.
Why do seconds matter so much?
Because the whole process is a chain of delays. If the total delay eats up the available time, the system cannot respond effectively.
Final thoughts
If you want to explain how Iron Dome works to normal people, do not start with complex terms. Start with the loop.
A sensor sees something.
Tracking makes sense of messy data.
Prediction estimates what will happen next.
The decision chooses whether the action is worth it.
An interceptor acts.
Feedback updates the whole picture.
That is the story. It is clear. It is honest. And it is genuinely fascinating, because it shows how engineering turns raw physics into real-time decisions when time is the scarcest resource of all.
